









新闻中心 
LidaRF:研究用于街景神经辐射场的激光雷达数据(CVPR'24)
 2024-05-09
2024-05-09 浏览次数:次
浏览次数:次 返回列表
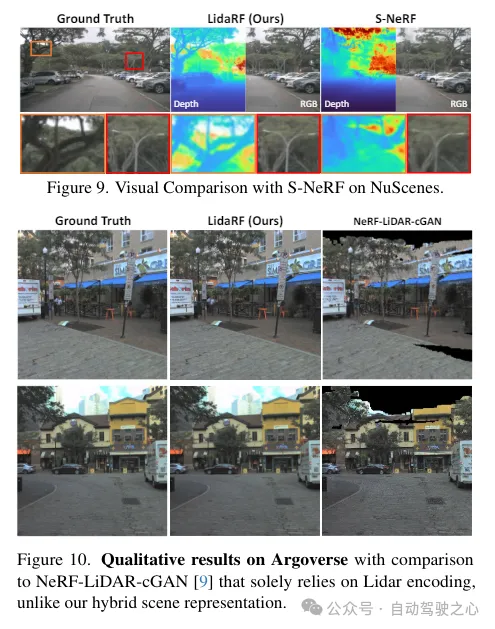
返回列表光真实感模拟在自动驾驶等应用中发挥着关键作用,其中神经网络辐射场(NeRFs)的进步可能通过自动创建数字3D资产来实现更好的可扩展性。然而,由于街道上相机运动的高度共线性和在高速下的稀疏采样,街景的重建质量受到影响。另一方面,该应用通常需要从偏离输入视角的相机视角进行渲染,以准确模拟如变道等行为。LidaRF提出了几个见解,允许更好地利用激光雷达数据来改善街景中NeRF的质量。首先,框架从激光雷达数据中学习几何场景表示,这些表示与基于隐式网格的解码器相结合,从而提供了由显示点云提供的更强的几何信息。其次,提出了一种鲁棒的遮挡感知深度监督训练策略,允许通过累积使用密集激光雷达点云的强势信息来改善街景中的NeRF重建质量。第三,根据激光雷达点的强度生成增强的训练视角,以进一步改进在真实驾驶场景下的新视角合成中获取的显著改进。 这样,通过框架从激光雷达数据中学习到的更加准确的几何场景表示,可以一步改进方法并在真实驾驶场景下获取更好的显著改进。
LidaRF的贡献主要体现在三个方面:
(i)混合激光雷达编码和网格特征以增强场景表示。虽然激光雷达已被用作自然的深度监控源,但将激光雷达纳入NeRF输入中,为几何归纳提供了巨大的潜力,但实现起来并不简单。为此,借用了基于网格的表示法,但将从点云中学习的特征融合到网格中,以继承显式点云表示法的优势。通过3D感知框架成功的启动,利用3D稀疏疗卷积网络作为一种有效且高效的结构,从激光雷达点云的局部和全局上下文中提取几何特征。
(ii)鲁棒的遮挡感知深度监督。与现有工作类似,这里也使用激光雷达作为深度监督的来源,但更加深入。由于激光雷达点的稀疏性限制了其有效性,尤其是在低纹理区域,通过跨邻近帧集化激光雷达点来生成更密集的深度图。然而,这样获得的深度图没有考虑到遮挡,产生了错误的深度监督。因此,提出了一种健壮的深度监督方案,借用class学习的方式——从近场到远场逐步监督深度,并在NeRF训练过程中逐渐滤除错误的深度,从而更有效地从激光雷达中学习深度。
(iii)基于激光雷达的视图增强。此外,鉴于驾驶场景中的视图稀疏性和覆盖有限,利用激光雷达来密集化训练视图。也就是说,将累积的激光雷达点投影到新的训练视图中;请注意,这些视图可能与驾驶轨迹有一定的偏离。这些从激光雷达投影的视图被添加到训练数据集中,它们并没有考虑到遮挡问题。然而,我们应用了前面提到的监督方案来解决遮挡问题,从而提高了性能。虽然我们的方法也适用于一般场景,但在这项工作中更专注于街道场景的评估,并与现有技术相比,无论是定量还是定性,都取得了显著的改进。
LidaRF在需要更大程度偏离输入视图的有趣应用中也显示出优势,在具有挑战性的街道场景应用中显著提高了NeRF的质量。
LidaRF整体框架一览
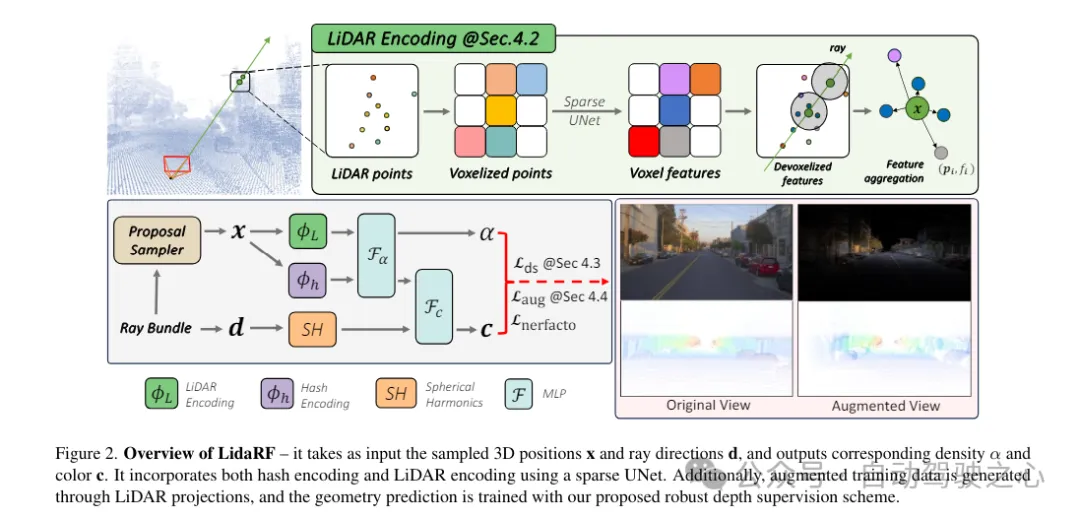
LidaRF是一种用于输入和输出对应的密度和颜色的方法,它采用了UNet融合了哈夫编码和激光雷达编码。此外,通过激光雷达投影生成强化训练数据,使用提出的健壮深度监督方案训练几何预测。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
1)激光雷达编码的混合表示法
激光雷达点云具有强大的几何指导潜力,这对NeRF(神经渲染场)来说极具价值。然而,仅依赖激光雷达特征来进行场景表示,由于激光雷达点的稀疏性(尽管有时间累积),会导致低分辨率的渲染。此外,由于激光雷达的视野有限,例如它不能捕获超过一定高度的建筑物表面,因此在这些区域中会出现空白渲染。相比之下,本文的框架融合了激光雷达特征和高分辨率的空间网格特征,以利用两者的优势,并共同学习以实现高质量和完整的场景渲染。
激光雷达特征提取。在这里详细描述了每个激光雷达点的几何特征提取过程,参照图2,首先将整个序列的所有帧的激光雷达点云聚合起来,以构建更密集的点云集合。然后将点云体素化为体素网格,其中每个体素单元内的点的空间位置进行平均,为每个体素单元生成一个3维特征。受到3D感知框架广泛成功的启发,在体素网格上使用3D稀疏UNet对场景几何特征进行编码,这允许从场景几何的全局上下文中学习。3D稀疏UNet将体素网格及其3维特征作为输入,并输出neural volumetric 特征,每个被占用的体素由n维特征组成。
 易标AI
易标AI
告别低效手工,迎接AI标书新时代!3分钟智能生成,行业唯一具备查重功能,自动避雷废标项
 135
查看详情
135
查看详情

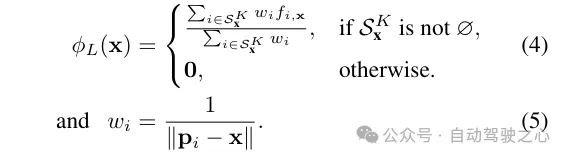
激光雷达特征查询。对于沿着要渲染的射线上的每个样本点x,如果在搜索半径R内有至少K个附近的激光雷达点,则查询其激光雷达特征;否则,其激光雷达特征被设置为空(即全零)。具体来说,采用固定半径最近邻(FRNN)方法来搜索与x相关的K个最近的激光雷达点索引集,记作。与[9]中在启动训练过程之前预先确定射线采样点的方法不同,本文的方法在执行FRNN搜索时是实时的,因为随着NeRF训练的收敛,来自region网络的样本点分布会动态地趋向于集中在表面上。遵循Point-NeRF的方法,我们的方法利用一个多层感知机(MLP)F,将每个点的激光雷达特征映射到神经场景描述中。对于x的第i个邻近点,F将激光雷达特征和相对位置作为输入,并输出神经场景描述作为:

为了获得采样位置x处的最终激光雷达编码ϕ,使用标准的反距离权重法来聚合其K个邻近点的神经场景描述
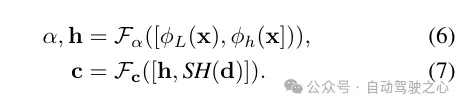
辐射解码的特征融合。将激光雷达编码ϕL与哈希编码ϕh进行拼接,并应用一个多层感知机Fα来预测每个样本的密度α和密度嵌入h。最后,通过另一个多层感知机Fc,根据观察方向d的球面谐波编码SH和密度嵌入h来预测相应的颜色c。
2)鲁棒深度监督
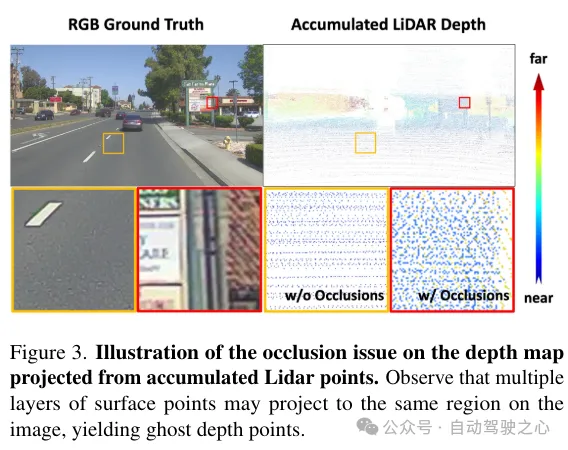
除了特征编码外,还通过将激光雷达点投影到图像平面上来从它们中获取深度监督。然而,由于激光雷达点的稀疏性,所得益处有限,不足以重建低纹理区域,如路面。在这里,我们提出累积相邻的激光雷达帧以增加密度。尽管3D点能够准确地捕获场景结构,但在将它们投影到图像平面以进行深度监督时,需要考虑点之间的遮挡。遮挡是由于相机与激光雷达及其相邻帧之间的位移增加而产生的,从而产生虚假的深度监督,如图3所示。由于即使累积后激光雷达的稀疏性,处理这个问题也非常困难,使得诸如z缓冲之类的基本原理图形技术无法应用。在这项工作中,提出了一种鲁棒的监督方案,以在训练NeRF时自动过滤掉虚假的深度监督。
遮挡感知的鲁棒监督方案。本文设计了一个class训练策略,使得模型最初使用更近、更可靠的深度数据进行训练,这些数据更不容易受到遮挡的影响。随着训练的进行,模型逐渐开始融合更远的深度数据。同时,模型还具备了丢弃与其预测相比异常遥远的深度监督的能力。
回想一下,由于车载摄像 头的向前运动,它产生的训练图像是稀疏的,视野覆盖有限,这给NeRF重建带来了挑战,尤其是当新视图偏离车辆轨迹时。在这里,我们提出利用激光雷达来增强训练数据。首先,我们通过将每个激光雷达帧的点云投影到其同步的摄像头上并为RGB值进行插值来为其上色。累积上色的点云,并将其投影到一组合成增强的视图上,生成如图2所示的合成图像和深度图。
头的向前运动,它产生的训练图像是稀疏的,视野覆盖有限,这给NeRF重建带来了挑战,尤其是当新视图偏离车辆轨迹时。在这里,我们提出利用激光雷达来增强训练数据。首先,我们通过将每个激光雷达帧的点云投影到其同步的摄像头上并为RGB值进行插值来为其上色。累积上色的点云,并将其投影到一组合成增强的视图上,生成如图2所示的合成图像和深度图。
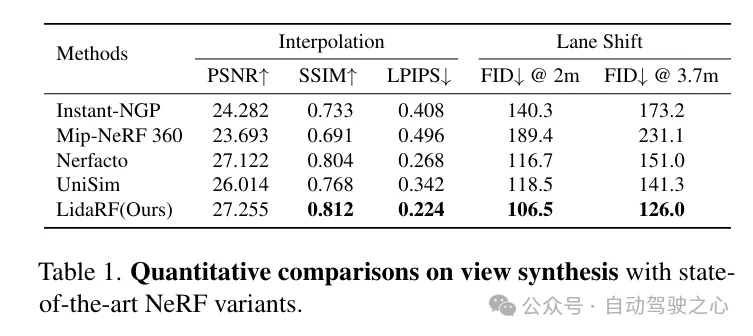
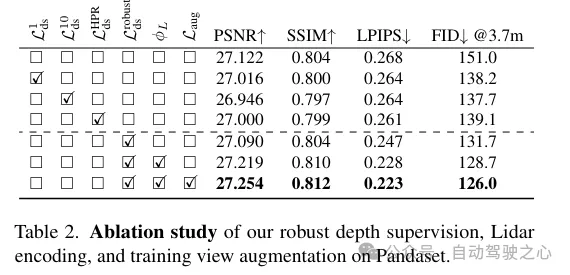
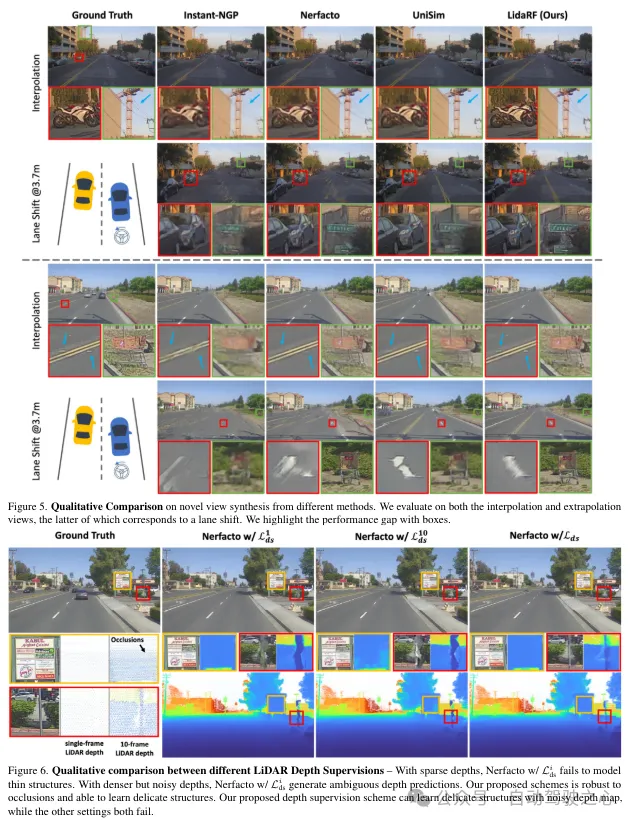
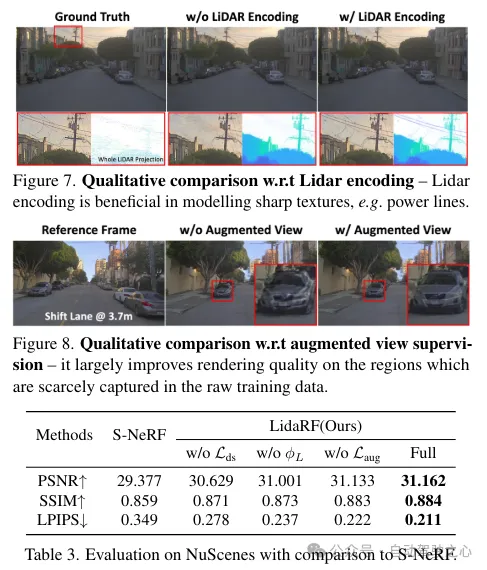
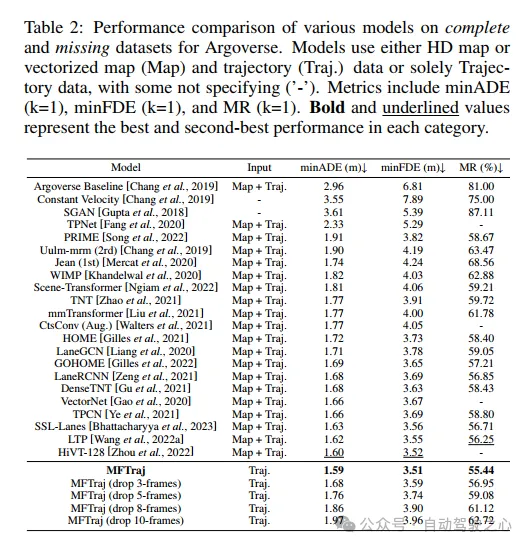
实验对比分析
以上就是LidaRF:研究用于街景神经辐射场的激光雷达数据(CVPR'24)的详细内容,更多请关注其它相关文章!
# 雷达
# 提出了
# 新能源
# 在这里
# 维特
# 但在
# 并在
# 考虑到
# 如图
# 数据
# 徐州seo技术培训
# 眉山定制网站建设优化
# 金华网站建设和推广怎样
# 如何在当地推广营销
# 楚雄营销推广
# 云南营销推广加盟电话
# 小企业网站建设
# 网络seo营销哪家好
# 中国SEO专家
# 百度seo是什么
# 开源
# 所示
相关栏目:
【
行业资讯67740 】
【
技术百科0 】
【
网络运营39195 】
相关推荐:
power在坐标轴中是什么意思
苹果16有哪些变化尺寸
固态硬盘如何判断大小
为什么夸克无法注销账户
如何通过命令系统还原
j*a怎么让数组倒换
1kb等于多少字节
光刻机是干什么用的
广东春运抢票怎么抢不到
命令指示符如何打开盘符
如何弄坏固态硬盘
typescript参数怎么用
如何给电脑加装固态硬盘
如何编写一个linux命令
typescript如何使用
本科一批和本科二批是什么意思
vs怎么编写typescript
ospf中交换机命令如何设置
j*a数组逆序怎么写
域名解析后为什么要进行域名备案
市盈率高是什么意思
跑分是什么意思
苹果16讲解有哪些功能
电动车充电器上的power是什么意思
单片机是怎么计时的
faq是什么意思
春运抢票如何快速抢到票
如何拍屏幕不出条纹详细方法
市盈率ttm是什么意思
显示器上power键是什么意思
联想的固态硬盘如何
a股等权平均市盈率是什么意思
a股等权市盈率中位数是什么意思
手机换电池要多少钱
typescript能开发什么
vivo手机爱奇艺怎么投屏到电视操作步骤
爱奇艺会员qq登录可以几个人用?
单片机加法程序怎么写
华为5g手机掉了怎么定位找回
手机如何更改固态硬盘
阿里云盘扩容工具怎么用
typescript如何遍历map
没网环境如何安装typescript
电脑显示屏上power是什么意思
爱奇艺fun会员可以几个人用?
锤子手机怎么不出5g
linux如何调出命令行
datediff快捷函数怎么用
make命令如何使用
power在充电器上是什么意思
