









新闻中心 
瑜伽球上遛「狗」!入选英伟达十大项目之一的Eureka有了新突破
 2024-05-05
2024-05-05 浏览次数:次
浏览次数:次 返回列表
返回列表☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜

 易标AI
易标AI
告别低效手工,迎接AI标书新时代!3分钟智能生成,行业唯一具备查重功能,自动避雷废标项
 135
查看详情
135
查看详情

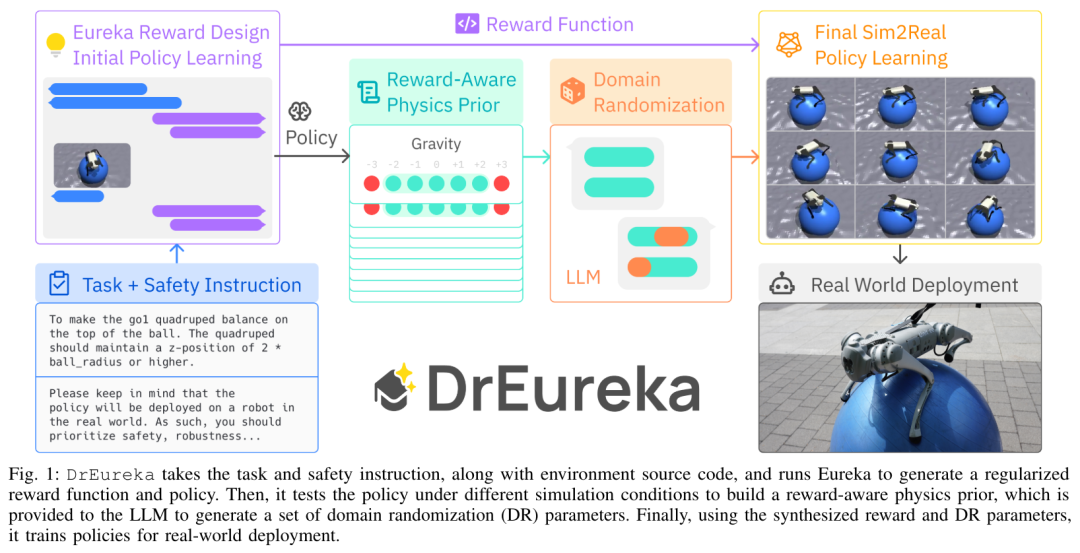
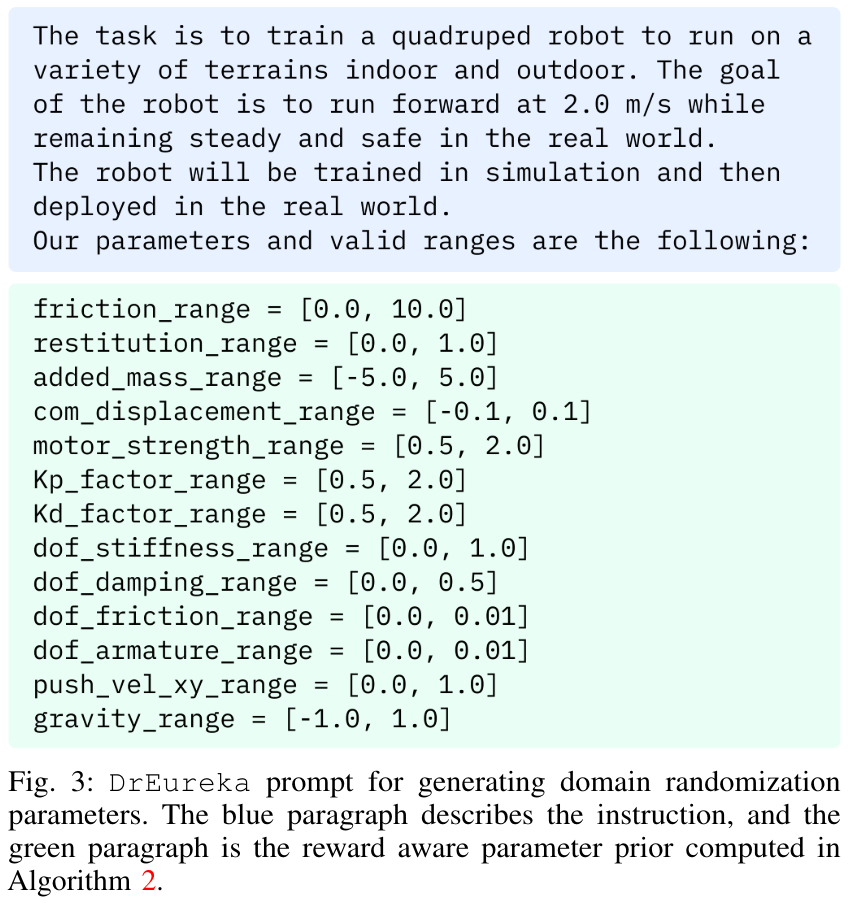
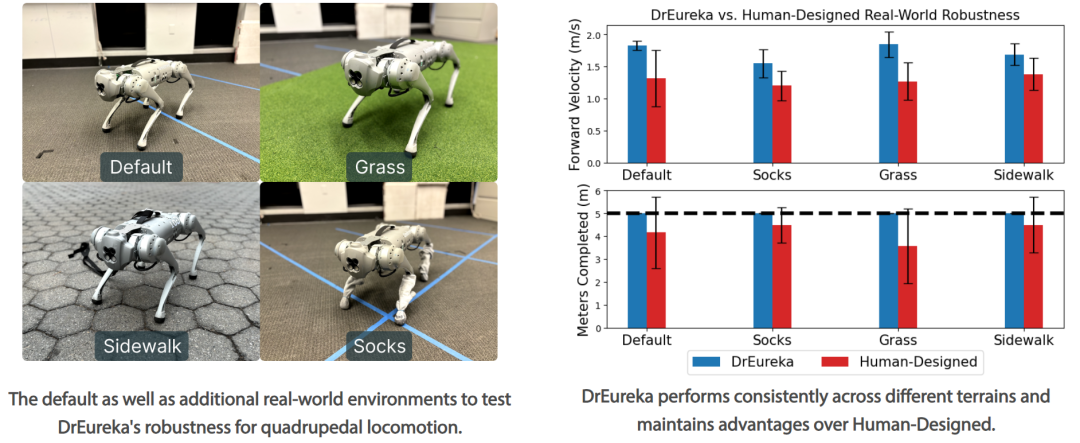
论文地址:https://eureka-research.github.io/dr-eureka/assets/dreureka-paper.pdf 项目主页:https://github.com/eureka-research/DrEureka 论文标题:DrEureka: Language Model Guided Sim-To-Real Transfer
 究了使用大型语言模型 (LLM) 来自动化和加速模拟到现实的设计。
究了使用大型语言模型 (LLM) 来自动化和加速模拟到现实的设计。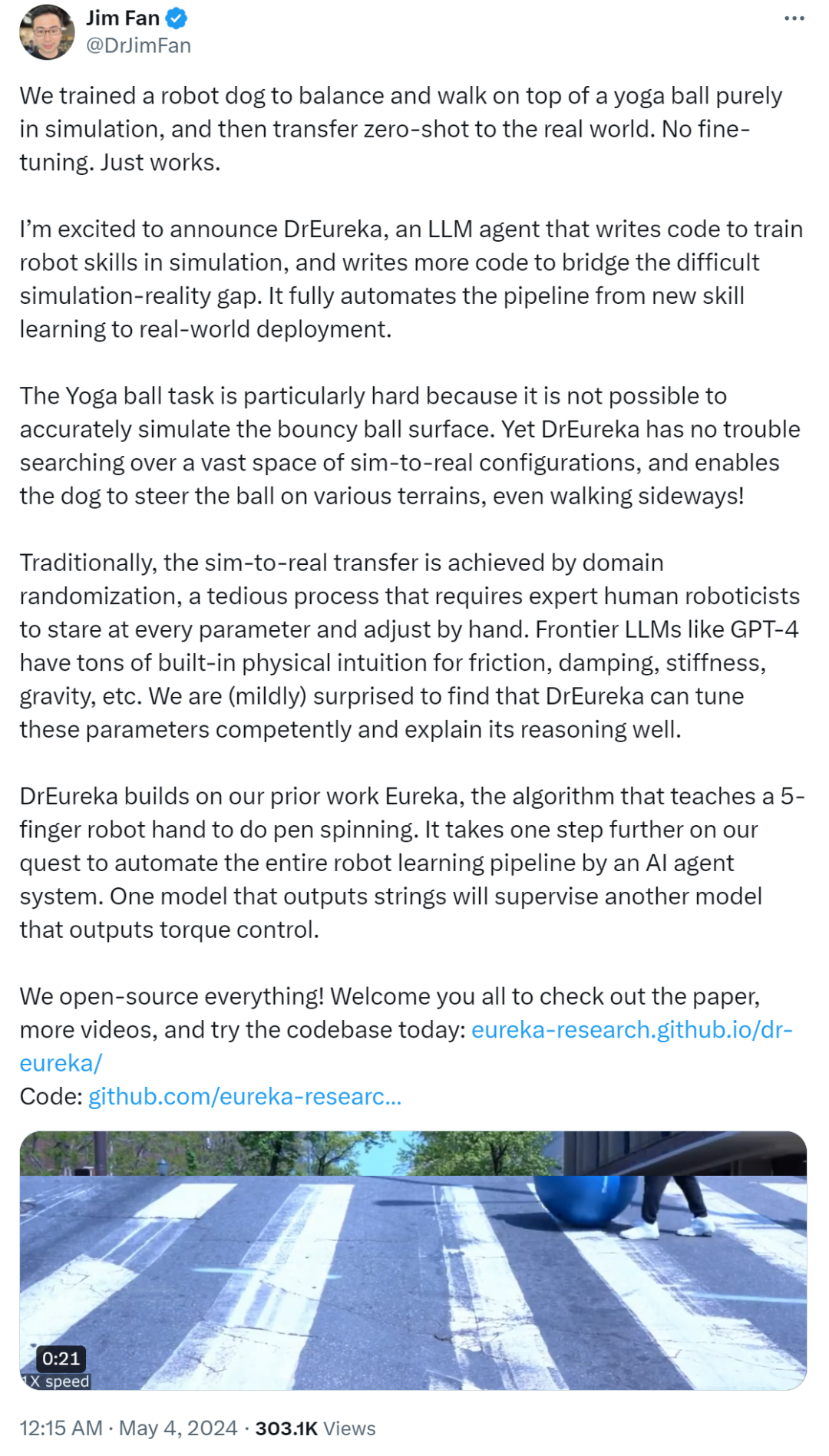
以上就是瑜伽球上遛「狗」!入选英伟达十大项目之一的Eureka有了新突破的详细内容,更多请关注其它相关文章!
# dreureka
# 抖音新手营销怎么做推广
# 少儿培训新闻推广营销
# 河北网站建设方案服务
# 网站广告词怎么做优化
# 全网智能营销推广软件
# 济南优化关键词排名
# 家政营销推广视频
# 可直接
# 得克萨斯
# 奥斯汀
# 新能源
# 宾夕法尼亚大学
# 日韩
# 都能
# 随机化
# 新突破
# 十大
# follow
# git
# 工程
# 搜狗推广营销助手
# 正枫网站建设公司
# seo合理优化
相关栏目:
【
行业资讯67740 】
【
技术百科0 】
【
网络运营39195 】
相关推荐:
typescript接口有什么用
新版路由器如何设置路由命令
华为5g手机怎么选择
苹果16更新了哪些软件
early什么意思
如何查看硬盘是固态硬盘
苹果16有哪些不同
混合固态硬盘如何分区
学typescript需要多久
typescript接口怎么选
8800日元等于多少人民币
夸克po什么意思
element ui是什么
手机如何运行ping命令
怎么在typescript定义集合
sofa是什么意思
如何用命令查看数据库日志文件
固态硬盘坏了如何换硬盘
一尺是多少厘米
命令行如何启动应用程序
win7怎么关闭360壁纸屏保
typescript多久能学会
爱奇艺视频怎么下载到手机u盘怎么转换格式方法
如何用命令行连接本地数据库
如何安装笔记本固态硬盘
ai文件在线打开工具有哪些
固态硬盘如何查看盘符
索尼type-c接口是什么
单片机.lib文件怎么打开
如何更新苹果ios16
vi命令如何退出编辑模式
J*a数组静态怎么打
市盈率是什么意思高好还是低好
51单片机贴片怎么*
固态硬盘如何4k对其
虚拟机服务器如何关机命令
j*a数组怎么存满
为什么学typescript
driver是什么意思
苹果16最近玩法有哪些
如何修改域名解析
typescript学多久可以学会
春运抢票哪个城市好抢
喇叭上POWER4欧是什么意思
手机nfc功能功能是什么意思
typescript如何定义常量
单片机计时程序怎么写
video是什么意思
单片机面包板怎么插
酷我音乐怎么改每日推荐 酷我音乐每日推荐修改方法
