









新闻中心 
CVPR 2025 | 自动驾驶世界模型四维时空预训练
 2024-08-07
2024-08-07 浏览次数:次
浏览次数:次 返回列表
返回列表北京大学与evlo创新团队共同提出面向自动驾驶的四维时空预训练算法driveworld。该方法采用世界模型进行预训练,设计记忆状态空间模型进行四维时空建模,通过预测场景的占据栅格,降低自动驾驶面临的随机不确定性和知识不确定性。该论文已被cvpr 2025接收。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
论文题目:DriveWorld: 4D Pre-trained Scene Understanding via World Models for Autonomous Driving
论文链接:https://www.php.cn/link/97f58cc60361f36cb40942c5c9a9e029
一、动机
自动驾驶的场景理解任务涉及到对场景的感知和预测未来变化等多个层面,这些层面不仅包括空间上的三维结构,还包含时间维度上的动态变化。这种复杂的场景理解要求模型能够捕捉和理解四维时空的内在关联,从而做出准确的决策。由于自然场景的随机性、环境的局部可观测性以及各种下游任务的多样性,学习四维时空表示是极具挑战性的。预训练在从大量数据中获取通用表示方面发挥着关键作用,能够构建一个具备通用知识的基础模型。然而,有关自动驾驶中四维时空的预训练研究仍然相对较少。
自动驾驶系统的设计和实现需要面对和处理各种不确定性,这些不确定性主要分为两类:Aleatoric不确定性和Epistemic不确定性。Aleatoric不确定性源自于世界的固有随机性,例如行人的突然移动或车辆的意外行为。Epistemic不确定性则源于对环境不完全的认知,例如由于遮挡或传感器限制导致的信息缺失。为了有效应对这些不确定性,自动驾驶系统必须能够利用过去的经验来预测未来可能的状态,并对不可见的区域进行推测。本工作通过四维时空预训练的世界模型来解决这一挑战,旨在提升自动驾驶系统在感知、预测和规划任务中的性能。
二、方法
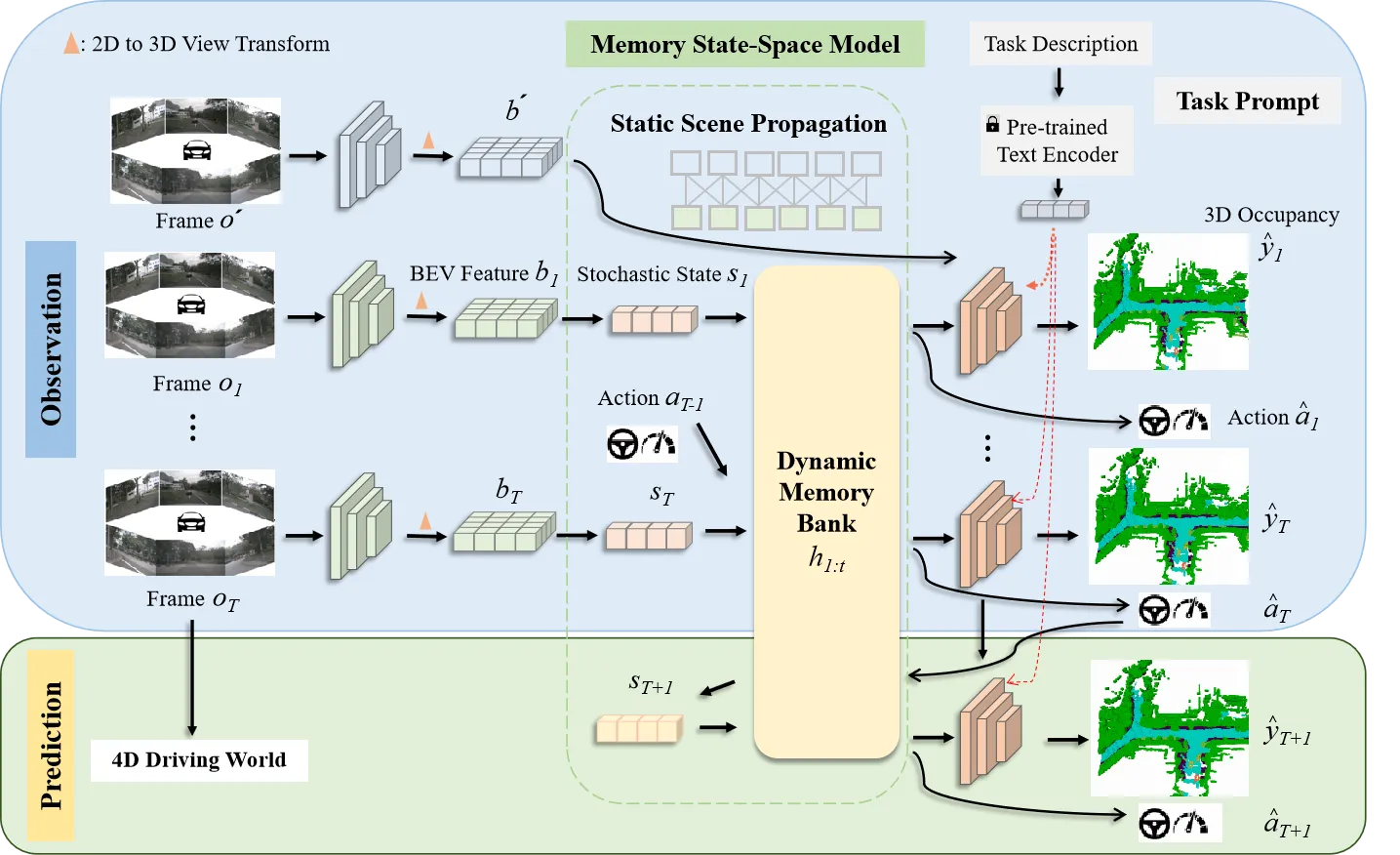
对于由自动驾驶环视相机系统观察到的T个视频帧的序列o1:T,以及它们对应的专家行为a1:T和三维占据栅格标签y1:T,其中三维占据栅格标签可以利用三维激光雷达点云和姿态数据获得。我们的目标是通过世界模型学习一个紧凑的BEV表示,该表示通过过去多视角图像和动作预测的当前和未来的三维占据栅格。
2.1时序概率模型
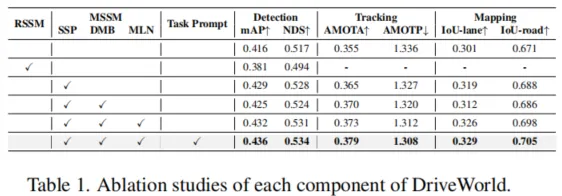
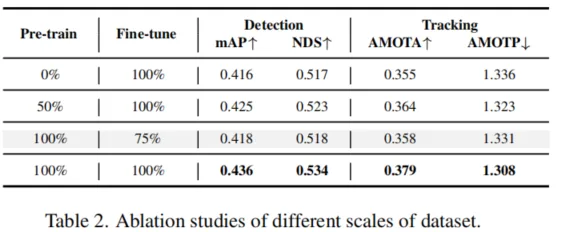
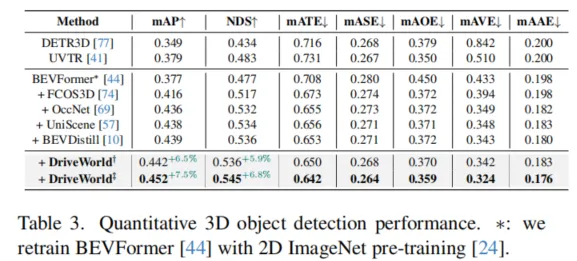
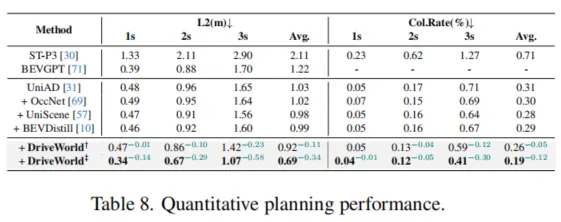
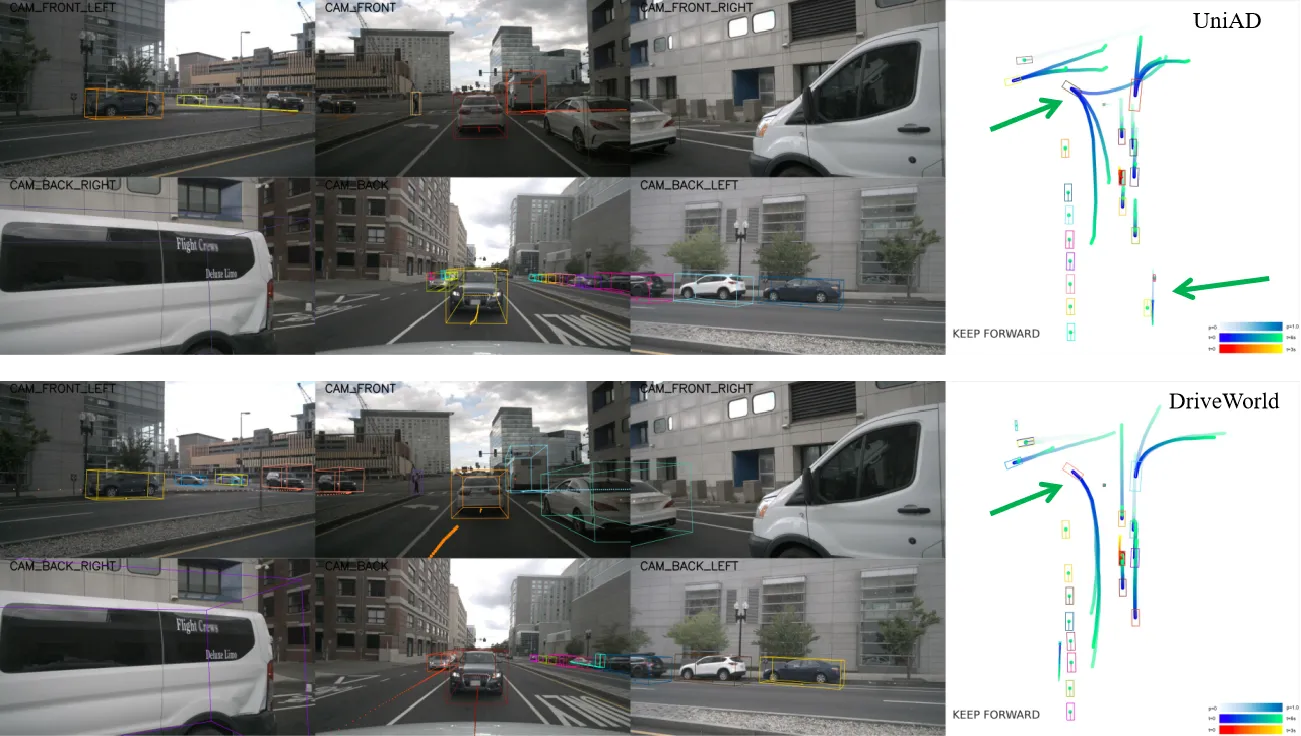
为了赋予模型四维时空建模的能力,我们首先引入两个潜在变量(h1:T,s1:T),其中ht表示历史信息变量,包含了到时间步t的所有历史信息,st表示随机状态变量,是模型预测未来状态的关键。ht通过历史信息h1:t−1和随机状态s1:t−1进行更新。为了预测未来状态,我们遵循循环状态空间模型(Recurrent State-Space Model,RSSM),构建后验状态分布q(st∣o≤t,a 考虑到BEV特征的维度很高,我们将其转换为一维向量xt,然后从(ht,at−1,xt)中抽样高斯分布以生成后验状态分布: 在没有观察到图像的情况下,模型根据历史信息和预测的动作得出先验状态分布: 2.1.1 动态信息传递 在自动驾驶的场景理解中,考虑物体的运动对于准确预测未来状态至关重要。为了捕捉这种动态信息,我们提出通过引入运动参数来建模物体的运动,从而在动态信息传播过程中实现运动感知。我们引入了运动感知层归一化(MLN)。运动属性包括速度v和相对时间间隔Δt。(v,Δt)被展平并通过两个线性层(ξ1,ξ2)转换为仿射向量γ和β:γ=ξ1(v,Δt),β=ξ2(v,Δt)。 然后执行仿射变换以得到运动感知的潜在随机状态,表示为st=γ⋅LN(st)+β。随着车辆的运动,确定性历史状态ht可以建立动态记忆库h1:t。通过与动态记忆库进行交叉注意机制计算,可以得到确定性历史状态ht。 2.1.2 空间信息传递 在自动驾驶的场景理解中,除了动态变化信息,空间结构信息同样重要。由于连续的场景帧通常只包含微小的变化,而场景的主要内容往往是由静态物体组成的,如道路、树木和交通标志,因此在处理这些信息时,直接将输入图像转换为一维向量可能会导致关键空间结构信息的丢失。我们从1到T帧中随机选择一帧o′,并使用其BEV特征b′构建一个描述空间感知结构的潜在静态表示b^=zθ(b′)。我们将空间感知的静态表示b^与动态变化的运动表示st结合起来,得到了周围场景的综合表示。 2.2 预训练辅助任务 对周围环境的全面理解对自动驾驶视至关重要的。我们提出将物理世界建模为三维占据栅格结构来描述车辆周围的环境。三维占据栅格解码器被设置为y^t=lθ(mθ(h~t,st),b^),其中mθ是将一维特征扩展到BEV维度的网络,lθ是用于预测占据栅格的三维卷积网络。这种四维占据栅格预训练不仅能够捕捉到场景的静态结构,还能够理解场景随时间的动态变化,为自动驾驶系统提供了更加丰富和动态的环境理解。 2.3 任务提示机制 虽然通过世界模型设计的预训练任务可以学习四维时空表示,但不同的下游任务关注的信息是不同的。为了缓解这个问题,受少样本图像识别的语义提示和多任务学习中的视觉示例引导提示的启发,引入了“任务提示”机制,为不同的任务提供特定的提示,以引导它们提取任务相关的特征。由于不同任务之间存在语义关联,我们利用大语言模型gφ(⋅)(例如BERT,CLIP)构建这些任务提示。例如,针对三维占据栅格重建任务的任务提示,其关注更多的是当前场景,设置为“任务是预测当前场景的三维占据栅格”。我们将提示ptext输入到gφ(⋅)中以获取提示编码gφ(ptext)。随后将其扩展到BEV的维度,表示为qφ(gφ(ptext)),将其与学到的时空特征集成在一起。 2.4 预训练目标函数 DriveWorld的预训练目标包括最小化后验状态分布与先验状态分布之间的差异(即Kullback-Leibler(KL)散度),以及最小化与过去和未来三维占据栅格(即交叉熵损失(CE))和动作(即L1损失)相关的损失。我们采用模型在T个时间步内观察输入,然后预测未来的三维占据栅格和L个步骤的动作。 三、实验 告别低效手工,迎接AI标书新时代!3分钟智能生成,行业唯一具备查重功能,自动避雷废标项 3.1 实验设置 我们在自动驾驶数据集上nuScenes和OpenScenes上进行预训练,并在nuScenes上进行微调。我们采用多帧激光雷达点云聚合的方式获得密集的三维占据栅格标签。 3.2 实验结果 这里展示部分结果,更多结果请参考论文。 四、总结 DriveWorld通过基于世界模型的四维时空预训练,提高自动驾驶系统对周围环境的理解和预测能力,降低自动驾驶面临的不确定性。DriveWorld提出了记忆状态空间模型进行时空建模,包含动态记忆存储模块用于学习时序感知表示,静态场景传播模块用于学习空间感知表示。为了进一步提升模型的适应性和灵活性,DriveWorld还引入了任务提示机制,允许模型根据当前的任务需求自适应地调整其表示,从而在不同的自动驾驶任务中实现最佳性能。 参考 [1]Chen Min, et al. Multi-Camera Unified Pre-Training Via 3D Scene Reconstruction[J]. IEEE Robotics and Automation Letters, 2025. [2]Chen Min, et al. Occupancy-mae: Self-supervised pre-training large-scale lidar point clouds with masked occupancy autoencoders[J]. IEEE Transactions on Intelligent Vehicles, 2025. EVOL创新团队介绍 赵健,中国电信人工智能研究院多媒体认知学习实验室(EVOL Lab)负责人、青年科学家,西北工业大学光电与智能研究院研究员、博导,博士毕业于新加坡国立大学,研究兴趣包括多媒体分析、临地安防、具身智能。 共发表CCF-A类论文60余篇,含一作T-PAMI×2(IF: 24.314)、IJCV×3(IF: 13.369),第一发明人授权国家发明专利5项。相关技术成果在百度、蚂蚁金服、奇虎360等6个科技行业领军企业得到应用,产生了显著效益。曾入选中国科协及北京市科协“青年人才托举工程”,主持国自然青年科学基金等项目6项。曾获吴文俊人工智能优秀青年奖(2025)、吴文俊人工智能自然科学奖一等奖(2/5,2025)、新加坡模式识别与机器智能协会(PREMIA)Lee Hwee Kuan奖、ACM Multimedia唯一最佳学生论文奖(一作,1/208,CCF-A类会议,2018),7次在国际重要科技赛事中夺冠。 担任北京图象图形学学会理事,国际知名期刊《Artificial Intelligence Advances》、《IET Computer Vision》编委,《Pattern Recognition Letters》、《Electronics》特刊客座编辑,VALSE资深领域主席,ACM Multimedia 2025分论坛主席,CICAI 2025/2025领域主席,CCBR 2025论坛主席,中国人工智能学会/中国图象图形学学会高级会员,“挑战杯”大学生科技作品竞赛评委,中国人工智能大赛专家委委员等。 GitHub主页:https://zhaoj9014.github.io 学院主页:https://www.php.cn/link/d0622bf20c3152d6c0d4335f537707ca 金磊,北京邮电大学特聘副研究员,主要研究方向包括计算机视觉、数据挖掘、模式识别,其中深入研究人体姿态估计、人体动作识别、人体解析等细分领域,相关成果发表于CVPR, AAAI, NIPS, ACMMM等高水平会议及期刊,共发表SCI/EI索引论文40余篇,其中高水平论文11篇,包括以第一作者发表中科院JCR一区论文(IEEE Transactions on MultiMedia),CCF-A类会议CVPR, ACMMM论文,中科院JCR二区(Sensors, IEEE Sensor Journal)论文等。主持一项国家自然基金青年基金,参与两项国家重点研发项目以及四项自然基金面上项目。多次依托顶会组织ICCV2025/CVPR2025 workshop (Anti-U* Workshop & Challenge)。指导学生获得全国大学生物联网技术与应用“三创”大赛一等奖(北邮认定A类竞赛)。 闵称,北京大学计算机学院博士,中科院计算所特别研究助理,主要研究方向包括自动驾驶
p(st∣ht−1,st−1)∽N(μθ(ht,a^t−1),σθ(ht,a^t−1)I),
其中st被参数化为带有对角协方差的正态分布,初始分布设置为s1∽N(0,I)。(μϕ,σϕ)是参数化后验状态分布的多层感知机。
p(st∣ht−1,st−1)∽N(μθ(ht,a^t−1),σθ(ht,a^t−1)I),
其中(μθ,σθ)参数化先验状态分布。??是用于预测动作 a^t−1的策略网络,基于历史信息ht−1和随机状态st−1。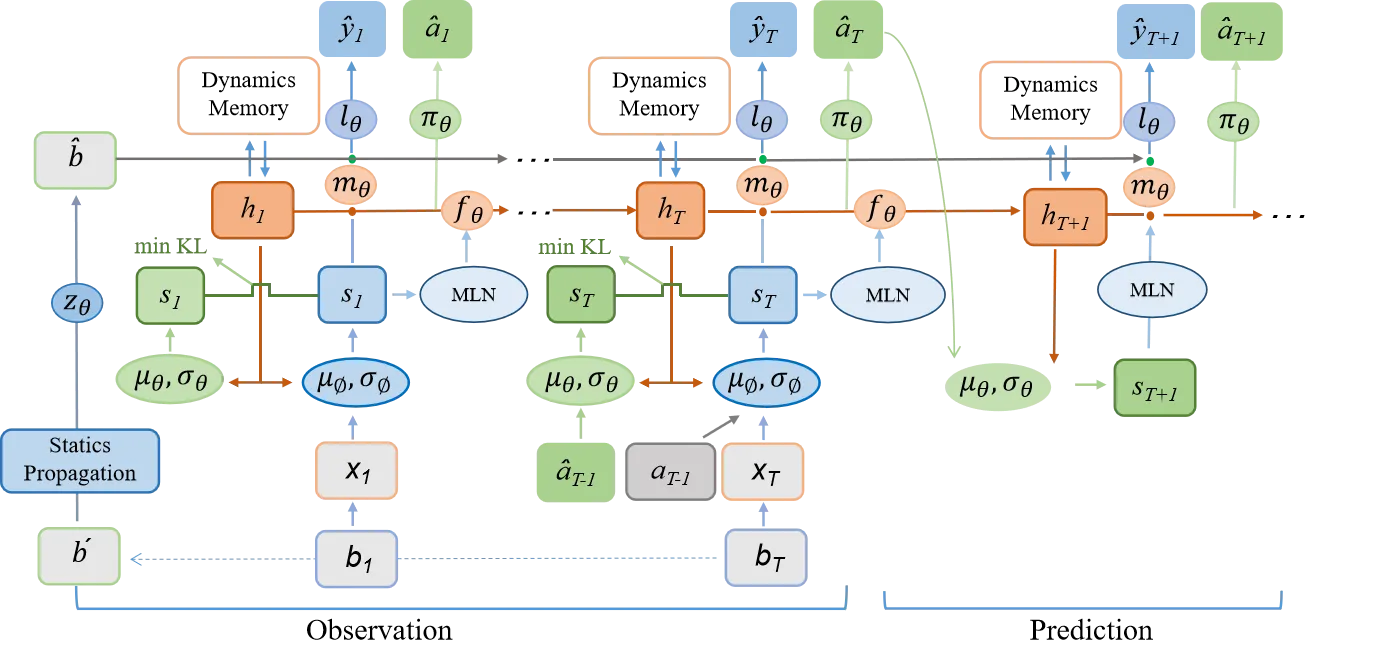
确定性历史状态为ht+1=fθ(ht,st)。 易标AI
易标AI
 135
查看详情
135
查看详情

 、具身智能、三维重建,相关成果发表于CVPR、ICCV、ICRA、RAL等高水平会议与期刊,包括以第一作者发表CCF-A类会议CVPR,机器人顶级会议ICRA,机器*威期刊RAL等。参与多项国家重点研发项目。
、具身智能、三维重建,相关成果发表于CVPR、ICCV、ICRA、RAL等高水平会议与期刊,包括以第一作者发表CCF-A类会议CVPR,机器人顶级会议ICRA,机器*威期刊RAL等。参与多项国家重点研发项目。
以上就是CVPR 2025 | 自动驾驶世界模型四维时空预训练的详细内容,更多请关注其它相关文章!
# git
# 嘉兴关键词排名电话多少
# 网站建设wbs工作分解
# 盲人按摩店怎样营销推广
# 新加坡
# 都能
# 中国
# 北京
# 转换为
# 设置为
# 省电
# 将其
# 未来
# 四维
# follow
# 理论
# 菜鸟企业网站建设
# 电子书也能推广行业网站
# 朋友圈推广营销工具商城
# 武汉seo系统转化乐云seo
# 遵义水网站建设
# 网站的线下营销推广方案
# 买微信seo
相关栏目:
【
行业资讯67740 】
【
技术百科0 】
【
网络运营39195 】
相关推荐:
如何操作fixup命令
j*a数组怎么存满
.asm如何在命令行运行
typescript和哪个语音很像
如何修改cad命令
市盈率静是什么意思
typescript什么意思
animal是什么意思
python 如何执行linux命令
三菱变频器POWER是什么意思
meet是什么意思
如何使用批处理命令编译vc程序
grub命令如何进dos
linux如何切换到命令行模式
苹果16哪些型号好
360n4怎么关闭锁屏壁纸
power在坐标轴中是什么意思
如何清理固态硬盘
哪个品牌有折叠屏手机卖
春运抢票在哪儿抢票
夸克网盘为什么解析错误
单片机怎么判定高电平
单片机怎么发送can 信号
苹果16将会带来哪些升级
市盈率高是什么意思
typescript怎么写游戏
j*a怎么存放数组中
苹果16新增哪些功能
ai文件里无法找到链接文件要怎么解决步骤
软件命令行参数如何设置
阿里云盘共享账户怎么用
typescript和node学哪个
自己如何加装固态硬盘
树莓派命令行如何新建文件
access中如何使用常用宏命令
typescript怎么传json
制冰机power1灯亮是什么意思
夸克还原排版是什么意思
恋爱软件免费聊天不收费的有哪些
电脑5G怎么上传手机
夸克网盘是什么都有吗
如何通过命令检测u盘启动
typescript接口怎么选
j*a中如何创建列表数组
为什么用typescript
苹果16要升级哪些功能
有什么基础可以学typescript
光猫power和pon常亮是什么意思
酷我音乐怎么改每日推荐 酷我音乐每日推荐修改方法
如何用好typescript
