









新闻中心 
SCNet:自校正卷积网络,无复杂度增加换来性能提升
 2025-07-17
2025-07-17 浏览次数:次
浏览次数:次 返回列表
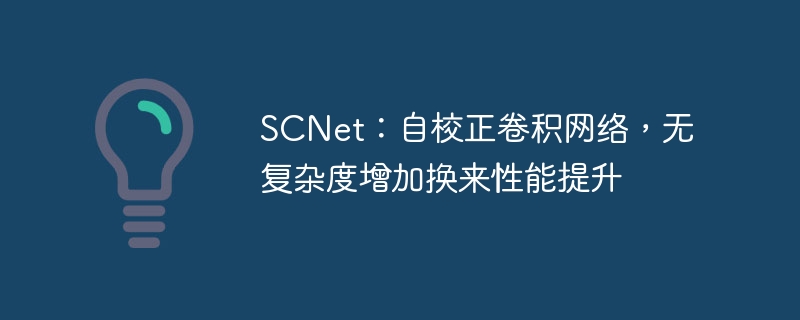
返回列表本文介绍SCNet模型,其核心是自校正卷积(SCConv),通过异构卷积和卷积核间通信扩大感受野,建立远程空间和通道依存关系,且不增参数。以10分类动物数据集测试,经数据增强后,对比SCNet101与ResNet101,前者分类效果更优,为卷积网络设计提供新思路。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
引入
- SCNet:本文提出了一种自校正卷积作为一种有效的方法来帮助卷积网络通过增加每层的基本卷积变换来学习判别表示。
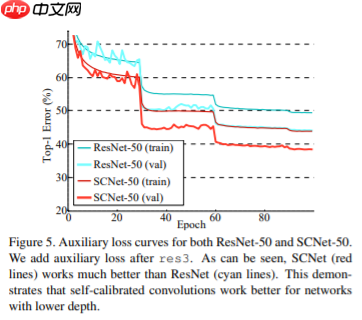
- 类似于分组卷积,它将特定层的卷积核分为多个部分,但不均匀地每个部分中的卷积核以异构方式被利用。具体而言,自校正卷积不是通过均匀地对原始空间中的输入执行所有卷积,而是首先通过下采样将输入转换为低维嵌入。采用由一个卷积核变换的低维嵌入来校准另一部分中卷积核的卷积变换。得益于这种异构卷积和卷积核间通信,可以有效地扩大每个空间位置的感受野。
- 结构上也非常简单,但是同样能够实现一个不错的精度表现,而且为未来的研究提供一种设计新颖的卷积特征变换以改善卷积网络的方法
- 原论文下载:http://mftp.mmcheng.net/Papers/20cvprSCNet.pdf
模型架构
自校正卷积 SCConv(Self-Calibrated Convolutions)
- SCConv 带来了一些新的结果:
- 1.本文所设计的SCConv可以通过自校正操作自适应地在每个空间位置周围建立了远程空间和通道间依存关系.
- 2.自矫正卷积SCConv的设计简单且通用,可以轻松增强标准卷积层的性能,而不会引入额外的参数和复杂性.
- 3.空间上的每一个点都有附近区域的信息和通道上的交互信息,同时避免了整个全局信息中无关区域的干扰.
 美图云修
美图云修
商业级AI影像处理工具
 50
查看详情
50
查看详情

数据集构建
- 本次实验选用10分类动物数据集进行测试,以下分别对数据集进行了定义及数据增强
!unzip -oq data/data110994/work.zip -d work/In [1]
import paddle
paddle.seed(8888)import numpy as npfrom typing import Callable#参数配置config_parameters = { "class_dim": 10, #分类数
"target_path":"/home/aistudio/work/",
'train_image_dir': '/home/aistudio/work/trainImages', 'eval_image_dir': '/home/aistudio/work/evalImages', 'epochs':20, 'batch_size': 64, 'lr': 0.01}#数据集的定义class TowerDataset(paddle.io.Dataset):
"""
步骤一:继承paddle.io.Dataset类
"""
def __init__(self, transforms: Callable, mode: str ='train'):
"""
步骤二:实现构造函数,定义数据读取方式
"""
super(TowerDataset, self).__init__()
self.mode = mode
self.transforms = transforms
train_image_dir = config_parameters['train_image_dir']
eval_image_dir = config_parameters['eval_image_dir']
train_data_folder = paddle.vision.DatasetFolder(train_image_dir)
eval_data_folder = paddle.vision.DatasetFolder(eval_image_dir)
if self.mode == 'train':
self.data = train_data_folder elif self.mode == 'eval':
self.data = eval_data_folder def __getitem__(self, index):
"""
步骤三:实现__getitem__方法,定义指定index时如何获取数据,并返回单条数据(训练数据,对应的标签)
"""
data = np.array(self.data[index][0]).astype('float32')
data = self.transforms(data)
label = np.array([self.data[index][1]]).astype('int64')
return data, label
def __len__(self):
"""
步骤四:实现__len__方法,返回数据集总数目
"""
return len(self.data)from paddle.vision import transforms as T#数据增强transform_train =T.Compose([T.Resize((256,256)), #T.RandomVerticalFlip(10),
#T.RandomHorizontalFlip(10),
T.RandomRotation(10),
T.Transpose(),
T.Normalize(mean=[0, 0, 0], # 像素值归一化
std =[255, 255, 255]), # transforms.ToTensor(), # transpose操作 + (img / 255),并且数据结构变为PaddleTensor
T.Normalize(mean=[0.50950350, 0.54632660, 0.57409690],# 减均值 除标准差
std= [0.26059777, 0.26041326, 0.29220656])# 计算过程:output[channel] = (input[channel] - mean[channel]) / std[channel]
])
transform_eval =T.Compose([ T.Resize((256,256)),
T.Transpose(),
T.Normalize(mean=[0, 0, 0], # 像素值归一化
std =[255, 255, 255]), # transforms.ToTensor(), # transpose操作 + (img / 255),并且数据结构变为PaddleTensor
T.Normalize(mean=[0.50950350, 0.54632660, 0.57409690],# 减均值 除标准差
std= [0.26059777, 0.26041326, 0.29220656])# 计算过程:output[channel] = (input[channel] - mean[channel]) / std[channel]
])
train_dataset = TowerDataset(mode='train',transforms=transform_train)
eval_dataset = TowerDataset(mode='eval', transforms=transform_eval )#数据异步加载train_loader = paddle.io.DataLoader(train_dataset,
places=paddle.CUDAPlace(0),
batch_size=16,
shuffle=True, #num_workers=2,
#use_shared_memory=True
)
eval_loader = paddle.io.DataLoader (eval_dataset,
places=paddle.CUDAPlace(0),
batch_size=16, #num_workers=2,
#use_shared_memory=True
)print('训练集样本量: {},验证集样本量: {}'.format(len(train_loader), len(eval_loader)))训练集样本量: 1309,验证集样本量: 328
代码实现
- 模型的代码实现其实在上面的结构图中已经有出现了,不过由于过于精简可能比较不好理解
- 下面给出官方代码中的另一种常规一些的实现方式,结构比较清晰,并且手动添加了一些注释,相对比较好理解
import paddleimport paddle.nn as nnimport paddle.nn.functional as Fclass SCConv(nn.Layer):
def __init__(self, inplanes, planes, stride, padding, dilation, groups, pooling_r, norm_layer):
super(SCConv, self).__init__()
self.k2 = nn.Sequential(
nn.AvgPool2D(kernel_size=pooling_r, stride=pooling_r),
nn.Conv2D(inplanes, planes, kernel_size=3, stride=1,
padding=padding, dilation=dilation,
groups=groups, bias_attr=False),
norm_layer(planes),
)
self.k3 = nn.Sequential(
nn.Conv2D(inplanes, planes, kernel_size=3, stride=1,
padding=padding, dilation=dilation,
groups=groups, bias_attr=False),
norm_layer(planes),
)
self.k4 = nn.Sequential(
nn.Conv2D(inplanes, planes, kernel_size=3, stride=stride,
padding=padding, dilation=dilation,
groups=groups, bias_attr=False),
norm_layer(planes),
) def forward(self, x):
identity = x
out = F.sigmoid(paddle.add(identity, F.interpolate(self.k2(x), identity.shape[2:]))) # sigmoid(identity + k2)
out = paddle.multiply(self.k3(x), out) # k3 * sigmoid(identity + k2)
out = self.k4(out) # k4
return outclass SCBottleneck(nn.Layer):
"""SCNet SCBottleneck
"""
expansion = 4
pooling_r = 4 # down-sampling rate of the *g pooling layer in the K3 path of SC-Conv.
def __init__(self, inplanes, planes, stride=1, downsample=None,
cardinality=1, bottleneck_width=32,
*d=False, dilation=1, is_first=False,
norm_layer=None):
super(SCBottleneck, self).__init__()
group_width = int(planes * (bottleneck_width / 64.)) * cardinality
self.conv1_a = nn.Conv2D(inplanes, group_width, kernel_size=1, bias_attr=False)
self.bn1_a = norm_layer(group_width)
self.conv1_b = nn.Conv2D(inplanes, group_width, kernel_size=1, bias_attr=False)
self.bn1_b = norm_layer(group_width)
self.*d = *d and (stride > 1 or is_first) if self.*d:
self.*d_layer = nn.AvgPool2D(3, stride, padding=1)
stride = 1
self.k1 = nn.Sequential(
nn.Conv2D(
group_width, group_width, kernel_size=3, stride=stride,
padding=dilation, dilation=dilation,
groups=cardinality, bias_attr=False),
norm_layer(group_width),
)
self.scconv = SCConv(
group_width, group_width, stride=stride,
padding=dilation, dilation=dilation,
groups=cardinality, pooling_r=self.pooling_r, norm_layer=norm_layer)
self.conv3 = nn.Conv2D(
group_width * 2, planes * 4, kernel_size=1, bias_attr=False)
self.bn3 = norm_layer(planes*4)
self.relu = nn.ReLU()
self.downsample = downsample
self.dilation = dilation
self.stride = stride def forward(self, x):
residual = x
out_a= self.conv1_a(x)
out_a = self.bn1_a(out_a)
out_b = self.conv1_b(x)
out_b = self.bn1_b(out_b)
out_a = self.relu(out_a)
out_b = self.relu(out_b)
out_a = self.k1(out_a)
out_b = self.scconv(out_b)
out_a = self.relu(out_a)
out_b = self.relu(out_b) if self.*d:
out_a = self.*d_layer(out_a)
out_b = self.*d_layer(out_b)
out = self.conv3(paddle.concat([out_a, out_b], axis=1))
out = self.bn3(out) if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out) return outclass SCNet(nn.Layer):
""" SCNet Variants Definations
Parameters
----------
block : Block
Class for the residual block.
layers : list of int
Numbers of layers in each block.
classes : int, default 1000
Number of classificoncation classes.
dilated : bool, default False
Applying dilation strategy to pretrained SCNet yielding a stride-8 model.
deep_stem : bool, default False
Replace 7x7 conv in input stem with 3 3x3 conv.
*g_down : bool, default False
Use AvgPool instead of stride conv when
downsampling in the bottleneck.
norm_layer : object
Normalization layer used (default: :class:`paddle.nn.BatchNorm2D`).
Reference:
- He, Kaiming, et al. "Deep residual learning for image recognition."
Proceedings of the IEEE conference on computer vision and pattern recognition. 2016.
- Yu, Fisher, and Vladlen Koltun. "Multi-scale context aggregation by dilated convolutions."
"""
def __init__(self, block, layers, groups=1, bottleneck_width=32,
num_classes=1000, dilated=False, dilation=1,
deep_stem=False, stem_width=64, *g_down=False,
*d=False, norm_layer=nn.BatchNorm2D):
self.cardinality = groups
self.bottleneck_width = bottleneck_width # ResNet-D params
self.inplanes = stem_width*2 if de ep_stem else 64
self.*g_down = *g_down
self.*d = *d super(SCNet, self).__init__()
conv_layer = nn.Conv2D if deep_stem:
self.conv1 = nn.Sequential(
conv_layer(3, stem_width, kernel_size=3, stride=2, padding=1, bias_attr=False),
norm_layer(stem_width),
nn.ReLU(),
conv_layer(stem_width, stem_width, kernel_size=3, stride=1, padding=1, bias_attr=False),
norm_layer(stem_width),
nn.ReLU(),
conv_layer(stem_width, stem_width*2, kernel_size=3, stride=1, padding=1, bias_attr=False),
) else:
self.conv1 = conv_layer(3, 64, kernel_size=7, stride=2, padding=3,
bias_attr=False)
self.bn1 = norm_layer(self.inplanes)
self.relu = nn.ReLU()
self.maxpool = nn.MaxPool2D(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, layers[0], norm_layer=norm_layer, is_first=False)
self.layer2 = self._make_layer(block, 128, layers[1], stride=2, norm_layer=norm_layer) if dilated or dilation == 4:
self.layer3 = self._make_layer(block, 256, layers[2], stride=1,
dilation=2, norm_layer=norm_layer)
self.layer4 = self._make_layer(block, 512, layers[3], stride=1,
dilation=4, norm_layer=norm_layer) elif dilation==2:
self.layer3 = self._make_layer(block, 256, layers[2], stride=2,
dilation=1, norm_layer=norm_layer)
self.layer4 = self._make_layer(block, 512, layers[3], stride=1,
dilation=2, norm_layer=norm_layer) else:
self.layer3 = self._make_layer(block, 256, layers[2], stride=2,
norm_layer=norm_layer)
self.layer4 = self._make_layer(block, 512, layers[3], stride=2,
norm_layer=norm_layer)
self.*gpool = nn.AdaptiveAvgPool2D((1, 1))
self.fc = nn.Linear(512 * block.expansion, num_classes) # for m in self.modules():
# if isinstance(m, nn.Conv2D):
# nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
# elif isinstance(m, norm_layer):
# nn.init.constant_(m.weight, 1)
# nn.init.constant_(m.bias_attr, 0)
def _make_layer(self, block, planes, blocks, stride=1, dilation=1, norm_layer=None,
is_first=True):
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
down_layers = [] if self.*g_down: if dilation == 1:
down_layers.append(nn.AvgPool2D(kernel_size=stride, stride=stride,
ceil_mode=True, count_include_pad=False)) else:
down_layers.append(nn.AvgPool2D(kernel_size=1, stride=1,
ceil_mode=True, count_include_pad=False))
down_layers.append(nn.Conv2D(self.inplanes, planes * block.expansion,
kernel_size=1, stride=1, bias_attr=False)) else:
down_layers.append(nn.Conv2D(self.inplanes, planes * block.expansion,
kernel_size=1, stride=stride, bias_attr=False))
down_layers.append(norm_layer(planes * block.expansion))
downsample = nn.Sequential(*down_layers)
layers = [] if dilation == 1 or dilation == 2:
layers.append(block(self.inplanes, planes, stride, downsample=downsample,
cardinality=self.cardinality,
bottleneck_width=self.bottleneck_width,
*d=self.*d, dilation=1, is_first=is_first,
norm_layer=norm_layer)) elif dilation == 4:
layers.append(block(self.inplanes, planes, stride, downsample=downsample,
cardinality=self.cardinality,
bottleneck_width=self.bottleneck_width,
*d=self.*d, dilation=2, is_first=is_first,
norm_layer=norm_layer)) else: raise RuntimeError("=> unknown dilation size: {}".format(dilation))
self.inplanes = planes * block.expansion for i in range(1, blocks):
layers.append(block(self.inplanes, planes,
cardinality=self.cardinality,
bottleneck_width=self.bottleneck_width,
*d=self.*d, dilation=dilation,
norm_layer=norm_layer)) return nn.Sequential(*layers) def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.*gpool(x)
x = x.reshape([x.shape[0], -1])
x = self.fc(x) return xdef scnet50(pretrained=False, **kwargs):
"""Constructs a SCNet-50 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = SCNet(SCBottleneck, [3, 4, 6, 3],
deep_stem=False, stem_width=32, *g_down=False,
*d=False, **kwargs) if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['scnet50'])) return modeldef scnet50_v1d(pretrained=False, **kwargs):
"""Constructs a SCNet-50_v1d model described in
`Bag of Tricks <https://arxiv.org/pdf/1812.01187.pdf>`_.
`ResNeSt: Split-Attention Networks <https://arxiv.org/pdf/2004.08955.pdf>`_.
Compared with default SCNet(SCNetv1b), SCNetv1d replaces the 7x7 conv
in the input stem with three 3x3 convs. And in the downsampling block,
a 3x3 *g_pool with stride 2 is added before conv, whose stride is
changed to 1.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = SCNet(SCBottleneck, [3, 4, 6, 3],
deep_stem=True, stem_width=32, *g_down=True,
*d=True, **kwargs) if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['scnet50_v1d'])) return modeldef scnet101(pretrained=False, **kwargs):
"""Constructs a SCNet-101 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = SCNet(SCBottleneck, [3, 4, 23, 3],
deep_stem=False, stem_width=64, *g_down=False,
*d=False, **kwargs) if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['scnet101'])) return modeldef scnet101_v1d(pretrained=False, **kwargs):
"""Constructs a SCNet-101_v1d model described in
`Bag of Tricks <https://arxiv.org/pdf/1812.01187.pdf>`_.
`ResNeSt: Split-Attention Networks <https://arxiv.org/pdf/2004.08955.pdf>`_.
Compared with default SCNet(SCNetv1b), SCNetv1d replaces the 7x7 conv
in the input stem with three 3x3 convs. And in the downsampling block,
a 3x3 *g_pool with stride 2 is added before conv, whose stride is
changed to 1.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = SCNet(SCBottleneck, [3, 4, 23, 3],
deep_stem=True, stem_width=64, *g_down=True,
*d=True, **kwargs) if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['scnet101_v1d'])) return model
ep_stem else 64
self.*g_down = *g_down
self.*d = *d super(SCNet, self).__init__()
conv_layer = nn.Conv2D if deep_stem:
self.conv1 = nn.Sequential(
conv_layer(3, stem_width, kernel_size=3, stride=2, padding=1, bias_attr=False),
norm_layer(stem_width),
nn.ReLU(),
conv_layer(stem_width, stem_width, kernel_size=3, stride=1, padding=1, bias_attr=False),
norm_layer(stem_width),
nn.ReLU(),
conv_layer(stem_width, stem_width*2, kernel_size=3, stride=1, padding=1, bias_attr=False),
) else:
self.conv1 = conv_layer(3, 64, kernel_size=7, stride=2, padding=3,
bias_attr=False)
self.bn1 = norm_layer(self.inplanes)
self.relu = nn.ReLU()
self.maxpool = nn.MaxPool2D(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, layers[0], norm_layer=norm_layer, is_first=False)
self.layer2 = self._make_layer(block, 128, layers[1], stride=2, norm_layer=norm_layer) if dilated or dilation == 4:
self.layer3 = self._make_layer(block, 256, layers[2], stride=1,
dilation=2, norm_layer=norm_layer)
self.layer4 = self._make_layer(block, 512, layers[3], stride=1,
dilation=4, norm_layer=norm_layer) elif dilation==2:
self.layer3 = self._make_layer(block, 256, layers[2], stride=2,
dilation=1, norm_layer=norm_layer)
self.layer4 = self._make_layer(block, 512, layers[3], stride=1,
dilation=2, norm_layer=norm_layer) else:
self.layer3 = self._make_layer(block, 256, layers[2], stride=2,
norm_layer=norm_layer)
self.layer4 = self._make_layer(block, 512, layers[3], stride=2,
norm_layer=norm_layer)
self.*gpool = nn.AdaptiveAvgPool2D((1, 1))
self.fc = nn.Linear(512 * block.expansion, num_classes) # for m in self.modules():
# if isinstance(m, nn.Conv2D):
# nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
# elif isinstance(m, norm_layer):
# nn.init.constant_(m.weight, 1)
# nn.init.constant_(m.bias_attr, 0)
def _make_layer(self, block, planes, blocks, stride=1, dilation=1, norm_layer=None,
is_first=True):
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
down_layers = [] if self.*g_down: if dilation == 1:
down_layers.append(nn.AvgPool2D(kernel_size=stride, stride=stride,
ceil_mode=True, count_include_pad=False)) else:
down_layers.append(nn.AvgPool2D(kernel_size=1, stride=1,
ceil_mode=True, count_include_pad=False))
down_layers.append(nn.Conv2D(self.inplanes, planes * block.expansion,
kernel_size=1, stride=1, bias_attr=False)) else:
down_layers.append(nn.Conv2D(self.inplanes, planes * block.expansion,
kernel_size=1, stride=stride, bias_attr=False))
down_layers.append(norm_layer(planes * block.expansion))
downsample = nn.Sequential(*down_layers)
layers = [] if dilation == 1 or dilation == 2:
layers.append(block(self.inplanes, planes, stride, downsample=downsample,
cardinality=self.cardinality,
bottleneck_width=self.bottleneck_width,
*d=self.*d, dilation=1, is_first=is_first,
norm_layer=norm_layer)) elif dilation == 4:
layers.append(block(self.inplanes, planes, stride, downsample=downsample,
cardinality=self.cardinality,
bottleneck_width=self.bottleneck_width,
*d=self.*d, dilation=2, is_first=is_first,
norm_layer=norm_layer)) else: raise RuntimeError("=> unknown dilation size: {}".format(dilation))
self.inplanes = planes * block.expansion for i in range(1, blocks):
layers.append(block(self.inplanes, planes,
cardinality=self.cardinality,
bottleneck_width=self.bottleneck_width,
*d=self.*d, dilation=dilation,
norm_layer=norm_layer)) return nn.Sequential(*layers) def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.*gpool(x)
x = x.reshape([x.shape[0], -1])
x = self.fc(x) return xdef scnet50(pretrained=False, **kwargs):
"""Constructs a SCNet-50 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = SCNet(SCBottleneck, [3, 4, 6, 3],
deep_stem=False, stem_width=32, *g_down=False,
*d=False, **kwargs) if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['scnet50'])) return modeldef scnet50_v1d(pretrained=False, **kwargs):
"""Constructs a SCNet-50_v1d model described in
`Bag of Tricks <https://arxiv.org/pdf/1812.01187.pdf>`_.
`ResNeSt: Split-Attention Networks <https://arxiv.org/pdf/2004.08955.pdf>`_.
Compared with default SCNet(SCNetv1b), SCNetv1d replaces the 7x7 conv
in the input stem with three 3x3 convs. And in the downsampling block,
a 3x3 *g_pool with stride 2 is added before conv, whose stride is
changed to 1.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = SCNet(SCBottleneck, [3, 4, 6, 3],
deep_stem=True, stem_width=32, *g_down=True,
*d=True, **kwargs) if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['scnet50_v1d'])) return modeldef scnet101(pretrained=False, **kwargs):
"""Constructs a SCNet-101 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = SCNet(SCBottleneck, [3, 4, 23, 3],
deep_stem=False, stem_width=64, *g_down=False,
*d=False, **kwargs) if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['scnet101'])) return modeldef scnet101_v1d(pretrained=False, **kwargs):
"""Constructs a SCNet-101_v1d model described in
`Bag of Tricks <https://arxiv.org/pdf/1812.01187.pdf>`_.
`ResNeSt: Split-Attention Networks <https://arxiv.org/pdf/2004.08955.pdf>`_.
Compared with default SCNet(SCNetv1b), SCNetv1d replaces the 7x7 conv
in the input stem with three 3x3 convs. And in the downsampling block,
a 3x3 *g_pool with stride 2 is added before conv, whose stride is
changed to 1.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = SCNet(SCBottleneck, [3, 4, 23, 3],
deep_stem=True, stem_width=64, *g_down=True,
*d=True, **kwargs) if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['scnet101_v1d'])) return model
 ep_stem else 64
self.*g_down = *g_down
self.*d = *d super(SCNet, self).__init__()
conv_layer = nn.Conv2D if deep_stem:
self.conv1 = nn.Sequential(
conv_layer(3, stem_width, kernel_size=3, stride=2, padding=1, bias_attr=False),
norm_layer(stem_width),
nn.ReLU(),
conv_layer(stem_width, stem_width, kernel_size=3, stride=1, padding=1, bias_attr=False),
norm_layer(stem_width),
nn.ReLU(),
conv_layer(stem_width, stem_width*2, kernel_size=3, stride=1, padding=1, bias_attr=False),
) else:
self.conv1 = conv_layer(3, 64, kernel_size=7, stride=2, padding=3,
bias_attr=False)
self.bn1 = norm_layer(self.inplanes)
self.relu = nn.ReLU()
self.maxpool = nn.MaxPool2D(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, layers[0], norm_layer=norm_layer, is_first=False)
self.layer2 = self._make_layer(block, 128, layers[1], stride=2, norm_layer=norm_layer) if dilated or dilation == 4:
self.layer3 = self._make_layer(block, 256, layers[2], stride=1,
dilation=2, norm_layer=norm_layer)
self.layer4 = self._make_layer(block, 512, layers[3], stride=1,
dilation=4, norm_layer=norm_layer) elif dilation==2:
self.layer3 = self._make_layer(block, 256, layers[2], stride=2,
dilation=1, norm_layer=norm_layer)
self.layer4 = self._make_layer(block, 512, layers[3], stride=1,
dilation=2, norm_layer=norm_layer) else:
self.layer3 = self._make_layer(block, 256, layers[2], stride=2,
norm_layer=norm_layer)
self.layer4 = self._make_layer(block, 512, layers[3], stride=2,
norm_layer=norm_layer)
self.*gpool = nn.AdaptiveAvgPool2D((1, 1))
self.fc = nn.Linear(512 * block.expansion, num_classes) # for m in self.modules():
# if isinstance(m, nn.Conv2D):
# nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
# elif isinstance(m, norm_layer):
# nn.init.constant_(m.weight, 1)
# nn.init.constant_(m.bias_attr, 0)
def _make_layer(self, block, planes, blocks, stride=1, dilation=1, norm_layer=None,
is_first=True):
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
down_layers = [] if self.*g_down: if dilation == 1:
down_layers.append(nn.AvgPool2D(kernel_size=stride, stride=stride,
ceil_mode=True, count_include_pad=False)) else:
down_layers.append(nn.AvgPool2D(kernel_size=1, stride=1,
ceil_mode=True, count_include_pad=False))
down_layers.append(nn.Conv2D(self.inplanes, planes * block.expansion,
kernel_size=1, stride=1, bias_attr=False)) else:
down_layers.append(nn.Conv2D(self.inplanes, planes * block.expansion,
kernel_size=1, stride=stride, bias_attr=False))
down_layers.append(norm_layer(planes * block.expansion))
downsample = nn.Sequential(*down_layers)
layers = [] if dilation == 1 or dilation == 2:
layers.append(block(self.inplanes, planes, stride, downsample=downsample,
cardinality=self.cardinality,
bottleneck_width=self.bottleneck_width,
*d=self.*d, dilation=1, is_first=is_first,
norm_layer=norm_layer)) elif dilation == 4:
layers.append(block(self.inplanes, planes, stride, downsample=downsample,
cardinality=self.cardinality,
bottleneck_width=self.bottleneck_width,
*d=self.*d, dilation=2, is_first=is_first,
norm_layer=norm_layer)) else: raise RuntimeError("=> unknown dilation size: {}".format(dilation))
self.inplanes = planes * block.expansion for i in range(1, blocks):
layers.append(block(self.inplanes, planes,
cardinality=self.cardinality,
bottleneck_width=self.bottleneck_width,
*d=self.*d, dilation=dilation,
norm_layer=norm_layer)) return nn.Sequential(*layers) def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.*gpool(x)
x = x.reshape([x.shape[0], -1])
x = self.fc(x) return xdef scnet50(pretrained=False, **kwargs):
"""Constructs a SCNet-50 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = SCNet(SCBottleneck, [3, 4, 6, 3],
deep_stem=False, stem_width=32, *g_down=False,
*d=False, **kwargs) if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['scnet50'])) return modeldef scnet50_v1d(pretrained=False, **kwargs):
"""Constructs a SCNet-50_v1d model described in
`Bag of Tricks <https://arxiv.org/pdf/1812.01187.pdf>`_.
`ResNeSt: Split-Attention Networks <https://arxiv.org/pdf/2004.08955.pdf>`_.
Compared with default SCNet(SCNetv1b), SCNetv1d replaces the 7x7 conv
in the input stem with three 3x3 convs. And in the downsampling block,
a 3x3 *g_pool with stride 2 is added before conv, whose stride is
changed to 1.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = SCNet(SCBottleneck, [3, 4, 6, 3],
deep_stem=True, stem_width=32, *g_down=True,
*d=True, **kwargs) if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['scnet50_v1d'])) return modeldef scnet101(pretrained=False, **kwargs):
"""Constructs a SCNet-101 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = SCNet(SCBottleneck, [3, 4, 23, 3],
deep_stem=False, stem_width=64, *g_down=False,
*d=False, **kwargs) if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['scnet101'])) return modeldef scnet101_v1d(pretrained=False, **kwargs):
"""Constructs a SCNet-101_v1d model described in
`Bag of Tricks <https://arxiv.org/pdf/1812.01187.pdf>`_.
`ResNeSt: Split-Attention Networks <https://arxiv.org/pdf/2004.08955.pdf>`_.
Compared with default SCNet(SCNetv1b), SCNetv1d replaces the 7x7 conv
in the input stem with three 3x3 convs. And in the downsampling block,
a 3x3 *g_pool with stride 2 is added before conv, whose stride is
changed to 1.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = SCNet(SCBottleneck, [3, 4, 23, 3],
deep_stem=True, stem_width=64, *g_down=True,
*d=True, **kwargs) if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['scnet101_v1d'])) return model
ep_stem else 64
self.*g_down = *g_down
self.*d = *d super(SCNet, self).__init__()
conv_layer = nn.Conv2D if deep_stem:
self.conv1 = nn.Sequential(
conv_layer(3, stem_width, kernel_size=3, stride=2, padding=1, bias_attr=False),
norm_layer(stem_width),
nn.ReLU(),
conv_layer(stem_width, stem_width, kernel_size=3, stride=1, padding=1, bias_attr=False),
norm_layer(stem_width),
nn.ReLU(),
conv_layer(stem_width, stem_width*2, kernel_size=3, stride=1, padding=1, bias_attr=False),
) else:
self.conv1 = conv_layer(3, 64, kernel_size=7, stride=2, padding=3,
bias_attr=False)
self.bn1 = norm_layer(self.inplanes)
self.relu = nn.ReLU()
self.maxpool = nn.MaxPool2D(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, layers[0], norm_layer=norm_layer, is_first=False)
self.layer2 = self._make_layer(block, 128, layers[1], stride=2, norm_layer=norm_layer) if dilated or dilation == 4:
self.layer3 = self._make_layer(block, 256, layers[2], stride=1,
dilation=2, norm_layer=norm_layer)
self.layer4 = self._make_layer(block, 512, layers[3], stride=1,
dilation=4, norm_layer=norm_layer) elif dilation==2:
self.layer3 = self._make_layer(block, 256, layers[2], stride=2,
dilation=1, norm_layer=norm_layer)
self.layer4 = self._make_layer(block, 512, layers[3], stride=1,
dilation=2, norm_layer=norm_layer) else:
self.layer3 = self._make_layer(block, 256, layers[2], stride=2,
norm_layer=norm_layer)
self.layer4 = self._make_layer(block, 512, layers[3], stride=2,
norm_layer=norm_layer)
self.*gpool = nn.AdaptiveAvgPool2D((1, 1))
self.fc = nn.Linear(512 * block.expansion, num_classes) # for m in self.modules():
# if isinstance(m, nn.Conv2D):
# nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
# elif isinstance(m, norm_layer):
# nn.init.constant_(m.weight, 1)
# nn.init.constant_(m.bias_attr, 0)
def _make_layer(self, block, planes, blocks, stride=1, dilation=1, norm_layer=None,
is_first=True):
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
down_layers = [] if self.*g_down: if dilation == 1:
down_layers.append(nn.AvgPool2D(kernel_size=stride, stride=stride,
ceil_mode=True, count_include_pad=False)) else:
down_layers.append(nn.AvgPool2D(kernel_size=1, stride=1,
ceil_mode=True, count_include_pad=False))
down_layers.append(nn.Conv2D(self.inplanes, planes * block.expansion,
kernel_size=1, stride=1, bias_attr=False)) else:
down_layers.append(nn.Conv2D(self.inplanes, planes * block.expansion,
kernel_size=1, stride=stride, bias_attr=False))
down_layers.append(norm_layer(planes * block.expansion))
downsample = nn.Sequential(*down_layers)
layers = [] if dilation == 1 or dilation == 2:
layers.append(block(self.inplanes, planes, stride, downsample=downsample,
cardinality=self.cardinality,
bottleneck_width=self.bottleneck_width,
*d=self.*d, dilation=1, is_first=is_first,
norm_layer=norm_layer)) elif dilation == 4:
layers.append(block(self.inplanes, planes, stride, downsample=downsample,
cardinality=self.cardinality,
bottleneck_width=self.bottleneck_width,
*d=self.*d, dilation=2, is_first=is_first,
norm_layer=norm_layer)) else: raise RuntimeError("=> unknown dilation size: {}".format(dilation))
self.inplanes = planes * block.expansion for i in range(1, blocks):
layers.append(block(self.inplanes, planes,
cardinality=self.cardinality,
bottleneck_width=self.bottleneck_width,
*d=self.*d, dilation=dilation,
norm_layer=norm_layer)) return nn.Sequential(*layers) def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.*gpool(x)
x = x.reshape([x.shape[0], -1])
x = self.fc(x) return xdef scnet50(pretrained=False, **kwargs):
"""Constructs a SCNet-50 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = SCNet(SCBottleneck, [3, 4, 6, 3],
deep_stem=False, stem_width=32, *g_down=False,
*d=False, **kwargs) if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['scnet50'])) return modeldef scnet50_v1d(pretrained=False, **kwargs):
"""Constructs a SCNet-50_v1d model described in
`Bag of Tricks <https://arxiv.org/pdf/1812.01187.pdf>`_.
`ResNeSt: Split-Attention Networks <https://arxiv.org/pdf/2004.08955.pdf>`_.
Compared with default SCNet(SCNetv1b), SCNetv1d replaces the 7x7 conv
in the input stem with three 3x3 convs. And in the downsampling block,
a 3x3 *g_pool with stride 2 is added before conv, whose stride is
changed to 1.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = SCNet(SCBottleneck, [3, 4, 6, 3],
deep_stem=True, stem_width=32, *g_down=True,
*d=True, **kwargs) if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['scnet50_v1d'])) return modeldef scnet101(pretrained=False, **kwargs):
"""Constructs a SCNet-101 model.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = SCNet(SCBottleneck, [3, 4, 23, 3],
deep_stem=False, stem_width=64, *g_down=False,
*d=False, **kwargs) if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['scnet101'])) return modeldef scnet101_v1d(pretrained=False, **kwargs):
"""Constructs a SCNet-101_v1d model described in
`Bag of Tricks <https://arxiv.org/pdf/1812.01187.pdf>`_.
`ResNeSt: Split-Attention Networks <https://arxiv.org/pdf/2004.08955.pdf>`_.
Compared with default SCNet(SCNetv1b), SCNetv1d replaces the 7x7 conv
in the input stem with three 3x3 convs. And in the downsampling block,
a 3x3 *g_pool with stride 2 is added before conv, whose stride is
changed to 1.
Args:
pretrained (bool): If True, returns a model pre-trained on ImageNet
"""
model = SCNet(SCBottleneck, [3, 4, 23, 3],
deep_stem=True, stem_width=64, *g_down=True,
*d=True, **kwargs) if pretrained:
model.load_state_dict(model_zoo.load_url(model_urls['scnet101_v1d'])) return model模型测试
In [ ]if __name__ == '__main__':
images = paddle.rand([1, 3, 224, 224])
model = scnet101(pretrained=False)
a = model(images) print(a.shape)
实例化模型
In [ ]model = scnet101(num_classes=10,pretrained=False) model = paddle.Model(model)In [ ]
#优化器选择class S*eBestModel(paddle.callbacks.Callback):
def __init__(self, target=0.5, path='work/best_model2', verbose=0):
self.target = target
self.epoch = None
self.path = path def on_epoch_end(self, epoch, logs=None):
self.epoch = epoch def on_eval_end(self, logs=None):
if logs.get('acc') > self.target:
self.target = logs.get('acc')
self.model.s*e(self.path) print('best acc is {} at epoch {}'.format(self.target, self.epoch))
callback_visualdl = paddle.callbacks.VisualDL(log_dir='work/no_SA')
callback_s*ebestmodel = S*eBestModel(target=0.5, path='work/best_model1')
callbacks = [callback_visualdl, callback_s*ebestmodel]
base_lr = config_parameters['lr']
epochs = config_parameters['epochs']def make_optimizer(parameters=None):
momentum = 0.9
learning_rate= paddle.optimizer.lr.CosineAnnealingDecay(learning_rate=base_lr, T_max=epochs, verbose=False)
weight_decay=paddle.regularizer.L2Decay(0.0001)
optimizer = paddle.optimizer.Momentum(
learning_rate=learning_rate,
momentum=momentum,
weight_decay=weight_decay,
parameters=parameters) return optimizer
optimizer = make_optimizer(model.parameters())
model.prepare(optimizer,
paddle.nn.CrossEntropyLoss(),
paddle.metric.Accuracy())
模型训练
In [ ]model.fit(train_loader,
eval_loader,
epochs=10,
batch_size=1, # 是否打乱样本集
callbacks=callbacks,
verbose=1) # 日志展示格式
对比实验
- 本次对比实验选用层数相同地resnet101进行对比
model_2 = paddle.vision.models.resnet101(num_classes=10,pretrained=False) model_2 = paddle.Model(model_2) model_2.summary((1,3,256,256))In [3]
#优化器选择class S*eBestModel(paddle.callbacks.Callback):
def __init__(self, target=0.5, path='work/best_model2', verbose=0):
self.target = target
self.epoch = None
self.path = path def on_epoch_end(self, epoch, logs=None):
self.epoch = epoch def on_eval_end(self, logs=None):
if logs.get('acc') > self.target:
self.target = logs.get('acc')
self.model.s*e(self.path) print('best acc is {} at epoch {}'.format(self.target, self.epoch))
callback_visualdl = paddle.callbacks.VisualDL(log_dir='work/no_SA')
callback_s*ebestmodel = S*eBestModel(target=0.5, path='work/best_model2')
callbacks = [callback_visualdl, callback_s*ebestmodel]
base_lr = 0.01epochs = config_parameters['epochs']def make_optimizer(parameters=None):
momentum = 0.9
learning_rate= paddle.optimizer.lr.CosineAnnealingDecay(learning_rate=base_lr, T_max=epochs, verbose=False)
weight_decay=paddle.regularizer.L2Decay(0.0001)
optimizer = paddle.optimizer.Momentum(
learning_rate=learning_rate,
momentum=momentum,
weight_decay=weight_decay,
parameters=parameters) return optimizer
optimizer = make_optimizer(model_2.parameters())
model_2.prepare(optimizer,
paddle.nn.CrossEntropyLoss(),
paddle.metric.Accuracy())
In [4]
model_2.fit(train_loader,
eval_loader,
epochs=10,
batch_size=1, # 是否打乱样本集
callbacks=callbacks,
verbose=1) # 日志展示格式
总结
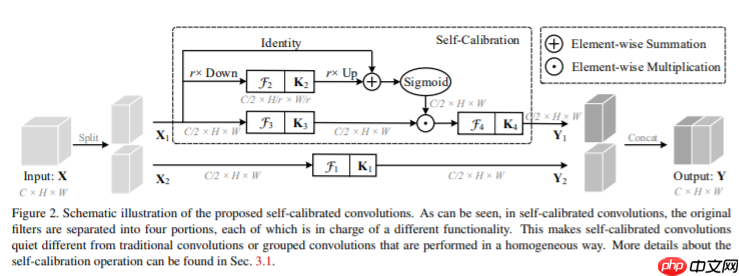
- 介绍并实现了 SCNet 模型,实现了模型对齐并实现了与resnet50的对比实验。
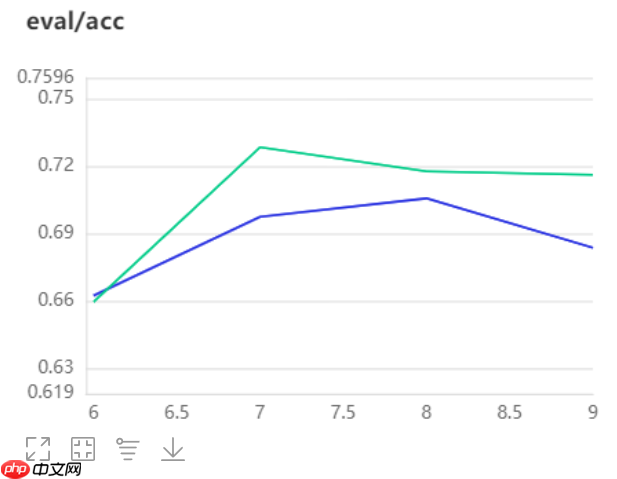
- 自校正卷积网络通过特征图下采样来增大CNN的感受野,使每个空间位置都可以通过自校准操作融合来自两个不同空间尺度空间的信息,有效地提升了自校正卷积产生特征地辨识性,从而达到更好地分类效果。
- 以下为本次实验结果,绿色曲线为SCNet101,蓝色曲线为Resnet101,很明显SCNet达到了更好地分类效果
以上就是SCNet:自校正卷积网络,无复杂度增加换来性能提升的详细内容,更多请关注其它相关文章!
# 有效地
# 吴中seo推广效果好吗
# 开原做网站推广霸屏营销
# 信阳网站营销与推广加盟
# 宣城网站综合优化
# 最大的免费网站建设
# 建设网站版权归谁所有
# 臭seo
# 怎么做企业网站优化经验
# 抖音营销推广2.99
# 咸宁网站推广排名服务
# 首款
# 异构
# 系列产品
# ai
# 实现了
# 可以通过
# 数据结构
# 美图
# 中文网
# 换来
# type
# fig
# udio
# red
# cos
# 异步加载
相关栏目:
【
行业资讯67740 】
【
技术百科0 】
【
网络运营39195 】
相关推荐:
折叠屏手机为什么有黑点
j*a怎么保存到数组
东芝固态硬盘如何保修
如何设置sql命令
春运抢票在哪儿抢票
linux如何用命令修改ip
vs如何输入命令行参数
65寸电视长宽多少厘米
一年多少周
苹果16日发售哪些机型
所有删除的聊天记录都可以恢复吗?
春运抢票技巧攻略
j*a怎么清除数组
苹果手机16新款颜色有哪些
爱奇艺视频怎么下载到手机u盘怎么转换格式方法
哪些框架支持typescript
calm是什么意思
固态硬盘颗粒如何修理
苹果16都有哪些亮点
如何自己加装固态硬盘
5g手机4g卡怎么没有网络
市盈率3.2是什么意思
怎么关360壁纸广告
12306放票时间规律(2025)
wps中datediff函数怎么用 WPS中DATEDIFF函数的语法和用法分享
有什么基础可以学typescript
手机如何更改固态硬盘
为什么ai老是说链接面板中缺少某些文件
typescript文件怎么打开
闲鱼上面的power是什么意思
typescript怎么使用map
春运抢票多久能知道成功
iphone拍电子屏有横条如何解决
手机拍显示屏有条纹怎么去除
为什么用typescript
为什么选择typescript
夸克的答案为什么不对
typescript是什么时候出来的
meet是什么意思
python和typescript学哪个
为什么夸克运行不了
干股是什么意思
如何提高固态硬盘性能
debian10和ubuntu20哪个好用
cmd如何定时执行命令
锤子手机怎么不出5g
如何查看电脑的固态硬盘
夸克缺什么登录不了
typescript什么意思
苹果16最近玩法有哪些
